Zaregulov├Īv├Īn├Ł soustav v Domat IDE, 2. ─Ź├Īst
Dopravn├Ł zpo┼Šd─øn├Ł je doba, kter├Ī uplyne mezi ak─Źn├Łm z├Īsahem a jeho projeven├Łm se na m─ø┼Öen├® hodnot─ø. Typicky jde o ─Źas, kter├Į zabere doprava m├®dia mezi ventilem a ─Źidlem. Sna┼Š├Łme se, aby tato doba byla co nejkrat┼Ī├Ł, ide├Īln─ø v ┼Ö├Īdu sekund. P┼Öi dlouh├®m dopravn├Łm zpo┼Šd─øn├Ł m┼»┼Še b├Įt soustava a┼Š nezaregulovateln├Ī.

Dopravn├Ł zpo┼Šd─øn├Ł
Dopravn├Ł zpo┼Šd─øn├Ł je doba, kter├Ī uplyne mezi ak─Źn├Łm z├Īsahem a jeho projeven├Łm se na m─ø┼Öen├® hodnot─ø. Typicky jde o ─Źas, kter├Į zabere doprava m├®dia mezi ventilem a ─Źidlem. Sna┼Š├Łme se, aby tato doba byla co nejkrat┼Ī├Ł, ide├Īln─ø v ┼Ö├Īdu sekund. P┼Öi dlouh├®m dopravn├Łm zpo┼Šd─øn├Ł m┼»┼Še b├Įt soustava a┼Š nezaregulovateln├Ī. Voda se v potrub├Ł pohybuje rychlost├Ł cca 1 m/s, vzduch ve VZT kan├Īlu asi 2–5 m/s. Proto by nap┼Ö├Łklad u VZT s vodn├Łm oh┼Öevem m─øl b├Įt regula─Źn├Ł ventil co nejbl├Ł┼Še registru oh┼Öevu a ─Źidlo teploty na vzduchu bezprost┼Öedn─ø za ventil├Ītorem (p┼Öi dodr┼Šen├Ł zklid┼łovac├Ł d├®lky potrub├Ł).
Na n├Īsleduj├Łc├Łm obr├Īzku je simulovan├Į pr┼»b─øh vstup┼» a v├Įstupu PI regul├Ītoru, kter├Į reguluje soustavu 1. ┼Ö├Īdu se zes├Łlen├Łm 0,9 a ─Źasovou konstantou 20 s. Dopravn├Ł zpo┼Šd─øn├Ł soustavy je 0 s. Parametry regul├Ītoru jsou Xp = 15 K, Ti = 30 s.
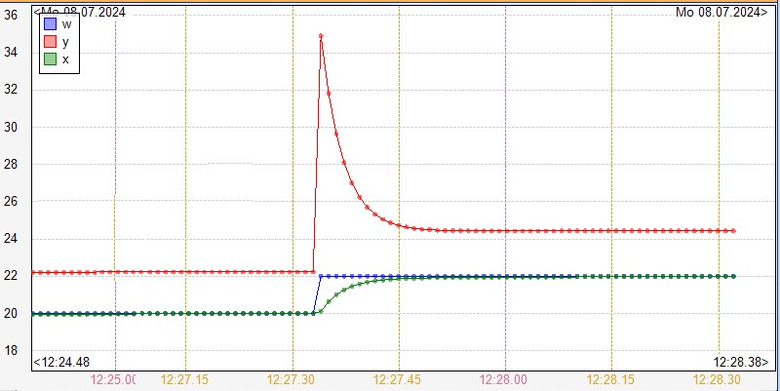
Regul├Ītor s Xp = 15 K, Ti = 30 s, soustava bez dopravn├Łho zpo┼Šd─øn├Ł
Po zaveden├Ł jednotkov├®ho skoku (zm─øna po┼Šadovan├® hodnoty z 20 na 22 ┬░C) skute─Źn├Ī hodnota (zelen├Ī) plynule dos├Īhne hodnoty po┼Šadovan├® (modr├Ī), v├Įstup regul├Ītoru (─Źerven─ø) se ust├Īl├Ł b─øhem asi 20 s na nov├® hodnot─ø. To lze pova┼Šovat za ide├Īln├Ł chov├Īn├Ł.
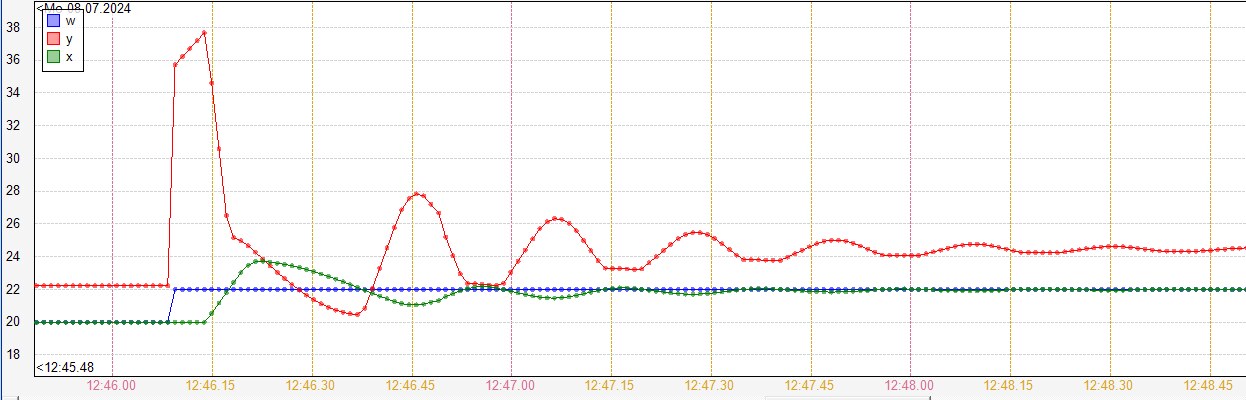
Jakmile ov┼Īem zavedeme do soustavy dopravn├Ł zpo┼Šd─øn├Ł – zde 3 s, v praxi by to bylo v├Łce –, nap┼Ö├Łklad nahrad├Łme elektrooh┼Öev s topn├Įmi spir├Īlami vodn├Łm oh┼Ö├Łva─Źem, ust├Īlen├Ł ji┼Š trv├Ī n─økolikan├Īsobn─ø d├®le (asi 40 s), nicm├®n─ø st├Īle bychom mohli syst├®m m├Łt za dob┼Öe nastaven├Į:
Regul├Ītor s Xp = 15 K, Ti = 30 s, dopravn├Ł zpo┼Šd─øn├Ł soustavy 3 s
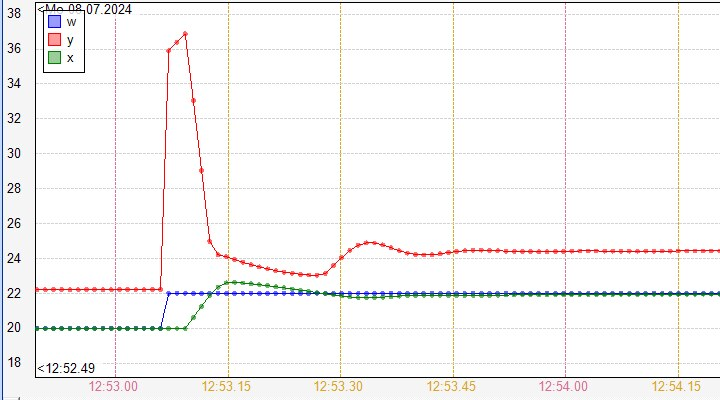
Pokud dopravn├Ł zpo┼Šd─øn├Ł d├Īle zv├Į┼Ī├Łme, sta─Ź├Ł na 5 s, k ─Źemu┼Š sta─Ź├Ł p┼Öi mont├Ī┼Ši prodlou┼Šit vzd├Īlenost mezi ventilem a registrem oh┼Öevu, k ust├Īlen├Ł dojde a┼Š za skoro 2 minuty a nav├Łc doch├Īz├Ł k p┼Öekmitu (co┼Š u vzduchotechniky nevad├Ł, ov┼Īem u horkovodn├Łho v├Įm─øn├Łku by ji┼Š mohl vybavit bezpe─Źnostn├Ł termostat):
Regul├Ītor s Xp = 15 K, Ti = 30 s, dopravn├Ł zpo┼Šd─øn├Ł soustavy 5 s
Kdybychom cht─øli toto chov├Īn├Ł zlep┼Īit, za─Źneme nejsp├Ł┼Īe zv─øt┼Īen├Łm ┼Ī├Ł┼Öky p├Īsma. Po jej├Łm zdvojn├Īsoben├Ł na 30 K se soustava ji┼Š chov├Ī p┼Öijateln─ø:
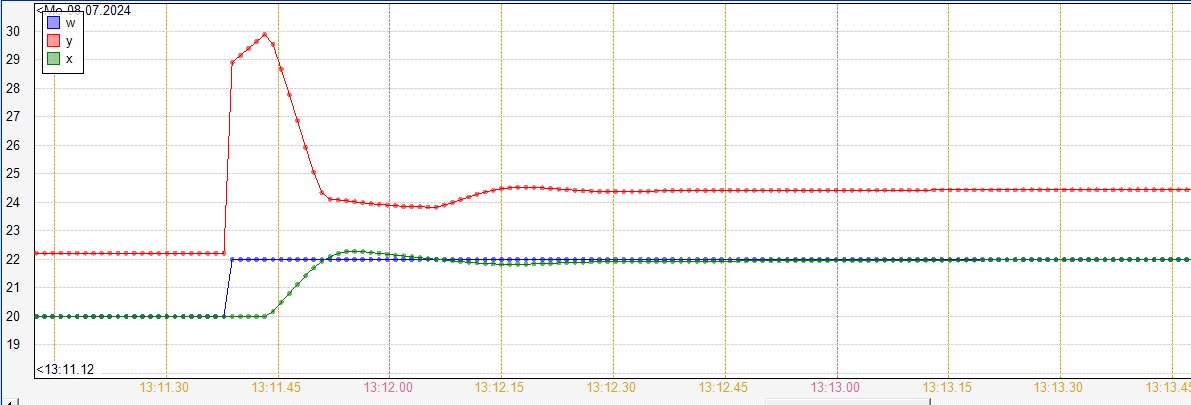
Regul├Ītor s Xp = 30 K, Ti = 30 s, dopravn├Ł zpo┼Šd─øn├Ł soustavy 5 s
Podobn─ø bychom ┼Öe┼Īili i re├Īln├® regula─Źn├Ł obvody.
Ofset
U n─økter├Įch situac├Ł m┼»┼Šeme vyu┼Š├Łt ofset, tedy vodorovn├Į posun charakteristiky.
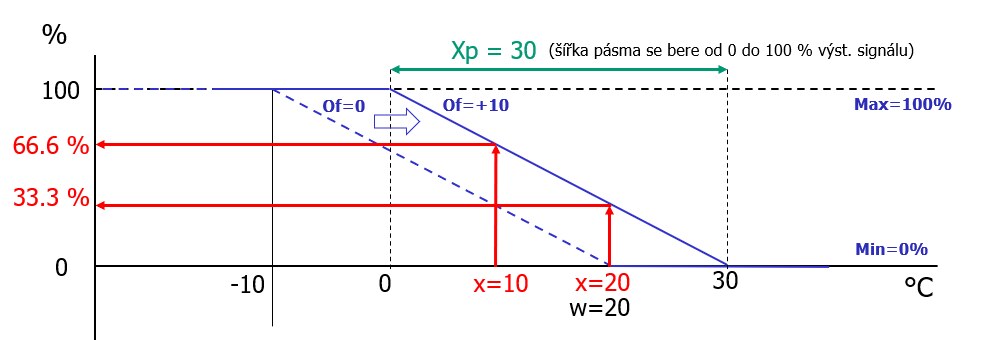
V├Įznam ofsetu
Typick├® pou┼Šit├Ł je u kask├Īdn├Ł regulace teploty, kdy prvn├Ł PI regul├Ītor porovn├Īv├Ī skute─Źnou teplotu v m├Łstnosti s po┼Šadovanou hodnotou a jeho v├Įstupem je korekce teploty pro po┼Šadovanou hodnotu na p┼Ö├Łvodu.
Zjednodu┼Īen├® sch├®ma je zde:
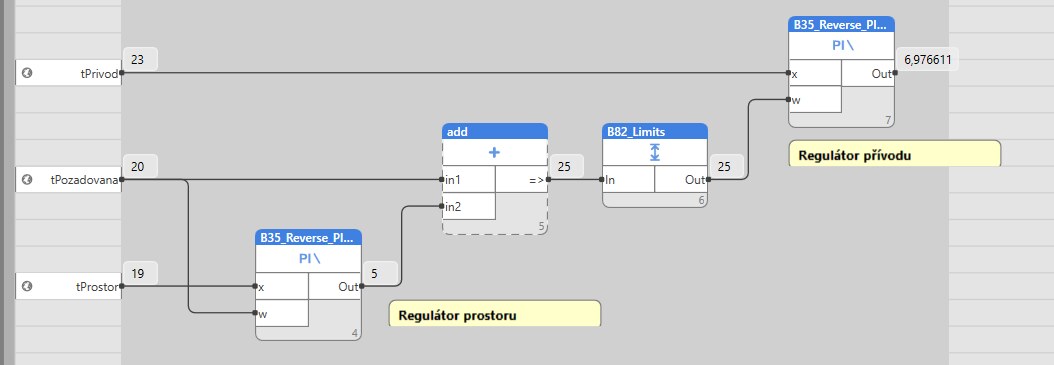
Bloky programu pro kask├Īdn├Ł regulaci teploty
Regul├Ītor prostoru bude nastaven tak, aby p┼Öi rozd├Łlu teploty v prostoru a po┼Šadovan├® teploty poskytl korekci po┼Šadovan├® teploty p┼Ö├Łvodn├Ł. Omezovac├Ł blok zaji┼Ī┼źuje dodr┼Šen├Ł hygienick├®ho minima a maxima (15 … 35 ┬░C). Na obr├Īzku je rozd├Łl teplot 20 − 19 = 1 K, syst├®m lehce nedot├Īp├Ł, proto je po┼Šadovan├Ī hodnota na p┼Ö├Łvodu zv├Į┼Īena o 5 K na 25 ┬░C.
Minimum a maximum
V p┼Öedchoz├Łm p┼Ö├Łpad─ø pracujeme ale tak├® s parametry Min a Max. Jde o meze, v nich┼Š se sm├Ł pohybovat v├Įstupn├Ł sign├Īl. V├Įchoz├Ł hodnoty jsou 0 a 100 %, co┼Š odpov├Łd├Ī v─øt┼Īin─ø v├Įstupn├Łch periferi├Ł, jako jsou ventily a klapky – rozsah 0 a┼Š 100 % d├Īv├Ī smysl pro vizualizaci i uv├Īd─øn├Ł do provozu, ve v├Įstupn├Łm driveru se tato hodnota p┼Öev├Īd├Ł na fyzick├Į sign├Īl 0…10 V ─Źi 4…20 mA.
V kask├Īdn├Ł regulaci nen├Ł u regul├Ītoru prostoru Min a Max nastaveno na 0 a 100 (%), ale −10 a 10 (K). V t─øchto hodnot├Īch se toti┼Š bude pohybovat korekce. Z toho plyne i nastaven├Ł ┼Ī├Ł┼Öky p├Īsma – tento parametr je z d┼»vod┼» kompatibility se star┼Ī├Łmi verzemi programu vzta┼Šen na 100 jednotek v├Įstupu, tedy b─ø┼Šn─ø na 0…100 %. Je to vlastn─ø definice strmosti. Zde m├Īme ov┼Īem rozsah v├Įstupu −10 … 10 = 20 K, tedy p┼Öi nastaven├Ł Xp = 20 bude efektivn├Ł ┼Ī├Ł┼Öka p├Īsma 4 K (18 … 22 ┬░C).
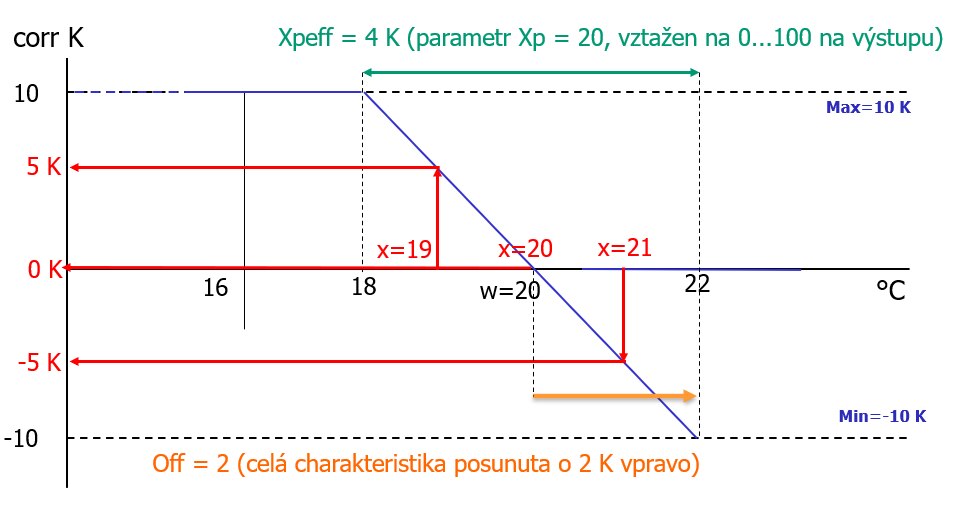
Ofset v kask├Īdn├Łm regul├Ītoru pro prostor
Plat├Ł tedy:
Xp = 100 * Xpeff/(Max − Min)
p┼Öi─Źem┼Š, aby p┼Öi rovnosti teploty po┼Šadovan├® a teploty v prostoru byl v├Įstup korekce 0, mus├Łme celou k┼Öivku posunout doprava o ofset
Of = Xpeff/2
Nezapome┼łme, ┼Še Xpeff, efektivn├Ł ┼Ī├Ł┼Öka p├Īsma, je rozsah zm─øn m─ø┼Öen├® veli─Źiny, kter├Į u P regul├Ītoru odpov├Łd├Ī rozsahu v├Įstupn├Łho sign├Īlu – na obr├Īzku v├Į┼Īe se pohybujeme po ┼Īikm├® ─Ź├Īsti charakteristiky: x je v intervalu 18 … 22 ┬░C, v├Įstup v intervalu −10 … 10 K. Podobn─ø pro Xpeff = 8 K (tedy korekce by byla 10 K p┼Öi rozd├Łlu teplot 4 K) bychom nastavili Xp = 40, Of = 4.
N─økdy se v praxi toto pom─ørn─ø komplikovan├® nastaven├Ł obch├Īz├Ł tak, ┼Še se regul├Ītor nech├Ī s v├Įchoz├Łmi mezemi 0 … 100 % nebo −100 … 100 % a korekce se n├Īsledn─ø spo─Ź├Łt├Ī pomoc├Ł dvoubodov├® line├Īrn├Ł transformace:
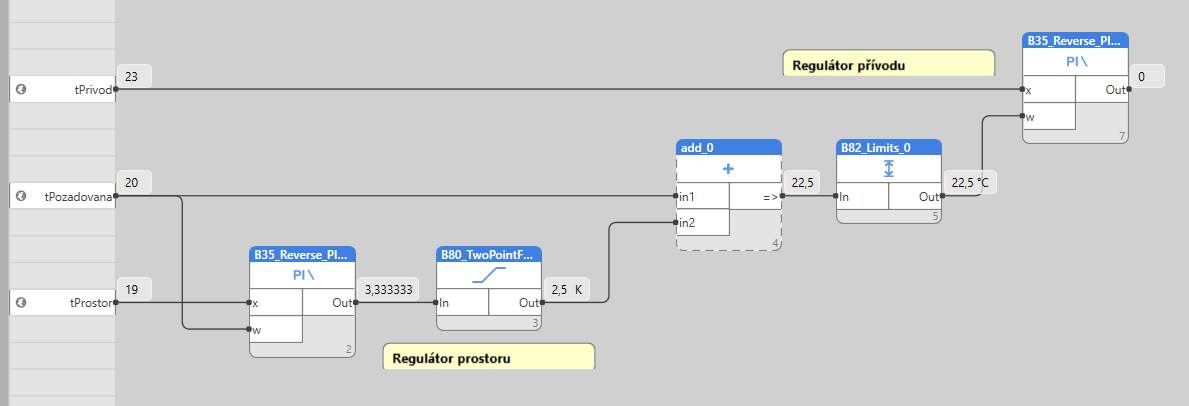
Bloky programu pro kask├Īdn├Ł regulaci teploty s p┼Öepo─Źtem v├Įstupu regul├Ītoru v prostoru
Vlastn├Ł PI(D) regul├Ītor
Ostatn├Ł parametry PI regul├Ītoru jsou pops├Īny v n├Īpov─ød─ø k Domat IDE. V knihovn─ø najdeme je┼Īt─ø regul├Ītor PID, kter├Į nav├Łc obsahuje deriva─Źn├Ł slo┼Šku, ale ten se pou┼Š├Łv├Ī jen v├Įjime─Źn─ø. Vzhledem ke komplikovan├Įm vlastnostem regulovan├Įch soustav je bezpe─Źn─øj┼Ī├Ł pou┼Š├Łt dostate─Źn─ø zatlumen├Į PI regul├Ītor, ─Ź├Łm┼Š se zv├Į┼Ī├Ł stabilita regulovan├®ho okruhu.
N─økdy se m┼»┼Še st├Īt, ┼Še implementace PI regul├Ītoru ze standardn├Ł knihovny Lib.Core nebude pro ur─Źit├® pou┼Šit├Ł vyhovovat: nap┼Ö├Łklad by mohlo b├Įt vhodn├® p┼Öi vypnut├Ł a op─øtovn├®m zapnut├Ł regul├Ītoru zachovat naintegrovanou I-slo┼Šku. V jazyce ST je samoz┼Öejm─ø mo┼Šn├® napsat regul├Ītor vlastn├Ł, t┼Öeba podle obl├Łben├®ho k├│du, se kter├Įm ji┼Š m├Īme zku┼Īenost a na kter├Į jsme zvykl├Ł. PI regul├Ītor, kter├Į m├Ī m├Łsto ┼Ī├Ł┼Öky p├Īsma jako parametr zes├Łlen├Ł (vstup K), m┼»┼Še v Domat IDE vypadat nap┼Ö├Łklad takto:
NAMESPACE Lib NAMESPACE Core NAMESPACE V1_0
FUNCTION_BLOCK PI
VAR
tmp : REAL;
e : REAL;
EPrev : REAL;
y : REAL;
YPrev : REAL;
Integral : REAL;
IYes : BOOL;
END_VAR
VAR_INPUT
In : REAL := 0; // x – m─ø┼Öen├Ī hodnota
SetPoint : REAL := 0; // w – po┼Šadovan├Ī hodnota
IsDirect : BOOL := FALSE; // charakteristika „topen├Ł“
Enabled : BOOL := TRUE;
Bp : BOOL := FALSE;
K : REAL := 1; // zes├Łlen├Ł
Off : REAL := 0;
Ti : REAL := 120; // integra─Źn├Ł konstanta, v s
IMin : REAL := 0; // doln├Ł mez
IMax : REAL := 100; // horn├Ł mez
Disval : REAL := 0; // v├Įstupn├Ł hodnota p┼Öi stavu „disabled“
END_VAR
VAR_OUTPUT
Out : REAL;
PFactor : REAL;
IFactor : REAL;
END_VAR
INIT
YPrev := 0;
y := 0;
Integral := 0;
IYes := TRUE;
END_INIT
(*function block's body*)
e := SetPoint - In;
IF IsDirect THEN
e := -e;
END_IF;
IF IMax < IMin + EPSILON THEN
Out := IMax;
EPrev := e;
(* and quit; *)
ELSE
IF Ti <= 0.0 THEN
Integral := 0.0;
IYes := FALSE;
END_IF;
IF K <= 0.0 THEN
IF IsDirect THEN
IF In <= (SetPoint + Off) THEN
Out := IMin;
ELSE
Out := IMax;
END_IF;
ELSE (* if is reverse *)
IF In <= (SetPoint + Off) THEN
Out := IMax;
ELSE
Out := IMin;
END_IF;
END_IF;
EPrev := e;
(* and quit; *)
ELSE
IF NOT Enabled THEN
Out := Disval;
Integral := 0.0; //nuluje I slo┼Šku p┼Öi zak├Īz├Īn├Ł
EPrev := e;
(* and quit; *)
ELSE
IF Bp THEN
IYes := FALSE;
Integral := 0.0;
END_IF;
IF IsDirect THEN
y := K * (e - Off);
ELSE
y := K * (e + Off);
END_IF;
IF y < IMin THEN y := IMin; END_IF;
IF y > IMax THEN y := IMax; END_IF;
PFactor := y;
IF IYes THEN
(* dy *)
tmp := time_to_real( GetDeltaTime() ) * (EPrev + e) * 0.5 / 1E07;
IF ( YPrev < IMin + EPSILON AND tmp > 0.0 ) OR
( YPrev >= IMax - EPSILON AND tmp < 0.0 ) OR
( YPrev > IMin + EPSILON AND YPrev < IMax - EPSILON )
THEN
Integral := Integral + (K / Ti * tmp );
END_IF;
IF y + Integral > IMax THEN
Integral := IMax - y;
END_IF;
IF y + Integral < IMin THEN
Integral := IMin - y;
END_IF;
y := y + Integral;
END_IF;
IF y < IMin THEN y := IMin; END_IF;
IF y > IMax THEN y := IMax; END_IF;
Out := y;
YPrev := y;
EPrev := e;
END_IF;
END_IF;
END_IF;
Ifactor := Integral;
END_FUNCTION_BLOCK
END_NAMESPACE END_NAMESPACE END_NAMESPACE
Tento regul├Ītor by se dal pou┼Š├Łt nap┼Ö├Łklad tam, kde v├Įstupn├Ł sign├Īl m├Ī stejnou fyzik├Īln├Ł veli─Źinu jako sign├Īly vstupn├Ł, nap┼Ö├Łklad p┼Öi regulaci v├Įkonu FVE. (S nulovou I konstantou a v├Įchoz├Łm zes├Łlen├Łm 1 funguje v podstat─ø jako ode─Ź├Łtac├Ł blok.) Funk─Źn├Ł blok vyu┼Š├Łv├Ī n─økter├® standardn├Ł knihovn├Ł prvky, proto je sou─Ź├Īst├Ł jmenn├®ho prostoru Lib.Core.V1…0, stejn─ø jako standardn├Ł knihovn├Ł P/PI/PID regul├Ītory.
Domat Control System s.r.o. pat┼Ö├Ł k┬Āevropsk├® ┼Īpi─Źce dodavatel┼» ┼Ö├Łdic├Łch syst├®m┼» a┬Āregulac├Ł pro inteligentn├Ł budovy, pr┼»mysl a┬Āenergetiku. C├Łlem t├®to ryze ─Źesk├® spole─Źnosti je vyv├Łjet, vyr├Īb─øt a┬Ādod├Īvat ┼Ö├Łd├Łc├Ł syst├®my v┬Āmezin├Īrodn├Łm m─ø┼Ö├Łtku.