NejÄastÄjĆĄĂ chyby regulace otopnĂœch systĂ©mĆŻ a ĆeĆĄenĂ samonastavujĂcĂmi se regulĂĄtory
PID regulĂĄtor je sloĆŸenĂœ z proporcionĂĄlnĂ, integraÄnĂ a derivaÄnĂ ÄĂĄsti. PĆi nevhodnÄ nastavenĂœch parametrech mĆŻĆŸe dochĂĄzet k neĆŸĂĄdoucĂm jevĆŻm v otopnĂœch systĂ©mech. Jejich potlaÄenĂ umoĆŸĆuje funkce samonastavenĂ.
Ăvod
ÄlĂĄnek se zabĂœvĂĄ problematikou regulace otopnĂœch systĂ©mĆŻ. V dneĆĄnĂch otopnĂœch systĂ©mech tvoĆĂ regulace nedĂlnou, ale v praxi nezĆĂdka kdy opomĂjenou, souÄĂĄst. Pro spojitĂ© ĆĂzenĂ, kterĂ©mu se ÄlĂĄnek vÄnuje, se nejÄastÄji pouĆŸĂvĂĄ PID regulĂĄtor (jmĂ©no odrĂĄĆŸĂ fakt, ĆŸe je sloĆŸenĂœ z proporcionĂĄlnĂ, integraÄnĂ a derivaÄnĂ ÄĂĄsti). PID regulĂĄtor mĂĄ nÄkolik parametrĆŻ, kterĂ© urÄujĂ jeho chovĂĄnĂ. PĆi nevhodnÄ nastavenĂœch parametrech mĆŻĆŸe dochĂĄzet k rĆŻznĂœm neĆŸĂĄdoucĂm jevĆŻm jako jsou oscilace, pĆekmity, nebo nedotĂĄpÄnĂ. DĆŻsledkem pak mohou bĂœt hydraulickĂ© problĂ©my v otopnĂ© soustavÄ, diskomfort, pĆĂpadnÄ snĂĆŸenĂ ĆŸivotnosti smÄĆĄovacĂch ventilĆŻ. BohuĆŸel, v praxi nenĂ Äasto vhodnĂ©mu nastavenĂ parametrĆŻ vÄnovĂĄna patĆiÄnĂĄ pozornost a dochĂĄzĂ ke zmĂnÄnĂœm neĆŸĂĄdoucĂm jevĆŻm. V ÄlĂĄnku bude pĆedstaven koncept samonastavujĂcĂho se regulĂĄtoru – RoboPID, kterĂœ vznikl v rĂĄmci spoluprĂĄce UniverzitnĂho centra energeticky efektivnĂch budov ÄVUT a firmy Energocentrum Plus, s.r.o.
Regulace otopnĂœch systĂ©mĆŻ
Pro regulace otopnĂœch systĂ©mĆŻ vyuĆŸĂvĂĄme spojitĂ© PID regulĂĄtory. ExistujĂ vĆĄak i jinĂ© regulace, napĆĂklad ON/OFF regulĂĄtor, kterĂœ zapĂnĂĄ a vypĂnĂĄ aktuĂĄtor a v soustavÄ tak dochĂĄzĂ k oscilaci ĆĂzenĂ© veliÄiny. ON/OFF regulace s hysterezĂ se vyuĆŸĂvĂĄ napĆĂklad pro elektrickĂœ ohĆev TUV. PID regulĂĄtor byl poprvĂ© vyuĆŸit v roce 1920 pro automatickĂ© kormidlovĂĄnĂ lodĂ. PotĂ© byla PID regulace aplikovĂĄna na automatickĂ© ĆĂzenĂ procesĆŻ v prĆŻmyslu, kde byl regulĂĄtor ĆeĆĄen pneumaticky a aĆŸ nĂĄslednÄ elektronicky. Dnes se PID regulĂĄtory pouĆŸĂvajĂ v ÄĂslicovĂ© podobÄ.
JednĂm z ĂșkolĆŻ pĆi pouĆŸitĂ PID regulĂĄtoru je nastavenĂ jeho parametrĆŻ, kterĂ© lze provĂ©st pomocĂ rĆŻznĂœch metod, napĆĂklad Ziegler-Nichols [2], LiptĂĄk [3], Witt-Waggoner [3], Haalman [4] a dalĆĄĂ. NastavenĂ parametrĆŻ regulĂĄtoru tak, aby pracoval sprĂĄvnÄ, mĂĄ svĂĄ specifika. ĆeĆĄenĂm nastavenĂ parametrĆŻ regulĂĄtoru mĆŻĆŸe bĂœt i samonastavujĂcĂ regulĂĄtor. SamonastavujĂcĂ se regulĂĄtor mĂĄ urÄitĂ© vĂœchozĂ naladÄnĂ, kterĂ© mĆŻĆŸe zpĆŻsobovat nedotĂĄpÄnĂ, oscilace soustavy a jinĂ© neĆŸĂĄdoucĂ jevy. PostupnĂœmi automatickĂœmi Ășpravami se regulĂĄtor pĆeladĂ tak, aby k tÄmto neĆŸĂĄdoucĂm jevĆŻm nedochĂĄzelo.
Diagnostika regulaÄnĂch smyÄek
Pro hodnocenĂ kvality regulace existujĂ Ćada kritĂ©riĂ. KomplexnÄ se problematice hodnocenĂ kvality vÄnuje disertaÄnĂ prĂĄce [1]. V tomto ÄlĂĄnku se omezĂme pouze na vĂœÄet vybranĂœch kritĂ©riĂ, kterĂĄ byla implementovĂĄna a vyhodnocena v rĂĄmci projektu RoboPID:
- Odchylka od poĆŸadovanĂ© hodnoty
Toto kritĂ©rium integruje rozdĂl mezi poĆŸadovanou a skuteÄnou hodnotou vĂœstupu regulĂĄtoru - RegulaÄnĂ chyba v ustĂĄlenĂ©m stavu
Toto kritĂ©rium poÄĂtĂĄ minimĂĄlnĂ, maximĂĄlnĂ a prĆŻmÄrnou odchylku poĆŸadovanĂ© a skuteÄnĂ© hodnoty v ustĂĄlenĂ©m stavu. - PoÄet oscilacĂ
Toto kritĂ©rium poÄĂtĂĄ poÄet prĆŻchodĆŻ regulaÄnĂ odchylky nulou. Pro zapoÄĂtĂĄnĂ prĆŻchodu je tĆeba aby se regulaÄnĂ odchylka v absolutnĂ hodnotÄ pĆekroÄila zadanou minimĂĄlnĂ hodnotu. - PĆekmit poĆŸadovanĂ© hodnoty
Toto kritĂ©rium analyzuje skokovĂ© zmÄny poĆŸadovanĂ© hodnoty. PĆi pĆekroÄenĂ zadanĂ© hranice se poÄĂtĂĄ procentuĂĄlnĂ pĆekmitnutĂ skuteÄnĂ© hodnoty od poĆŸadovanĂ©. - AnalĂœza rozsahu vstupu
Toto kritĂ©rium analyzuje rozdĂl mezi maximĂĄlnĂ a minimĂĄlnĂ hodnotou vstupu regulĂĄtoru na plovoucĂm oknÄ.
PĆi pouĆŸitĂ vhodnĂœch algoritmĆŻ je moĆŸnĂ© diagnostikovat chybnÄ nastavenou regulaci na zĂĄkladÄ mÄĆenĂœch dat. Je tĆeba zajistit dostateÄnÄ hustou periodu vzorkovĂĄnĂ mÄĆenĂœch dat. V dneĆĄnĂch systĂ©mech se setkĂĄvĂĄme typicky se vzorkovĂĄnĂm 5 minut, ale nenĂ vĂœjimkou ani vzorkovĂĄnĂ s hodinovĂœm krokem. Pro diagnostiku regulace je ideĂĄlnĂ vzorkovĂĄnĂ v ĆĂĄdu max. jednotek sekund, aby byly postihnuty zkoumanĂ© jevy (viz NyquistĆŻv–ShannonĆŻv vzorkovacĂ teorĂ©m). NicmĂ©nÄ nÄkterĂ© neĆŸĂĄdoucĂ jevy lze detekovat i na zĂĄkladÄ dat s mĂ©nÄ hustĂœm vzorkovĂĄnĂm.
NĂĆŸe jsou komentovanĂ© ukĂĄzky vybranĂœch detekovanĂœch regulaÄnĂch problĂ©mĆŻ. Ve vĆĄech pĆĂpadech je po celou dobu v chodu obÄhovĂ© Äerpadlo, tudĂĆŸ nenĂ v grafech uvedeno.
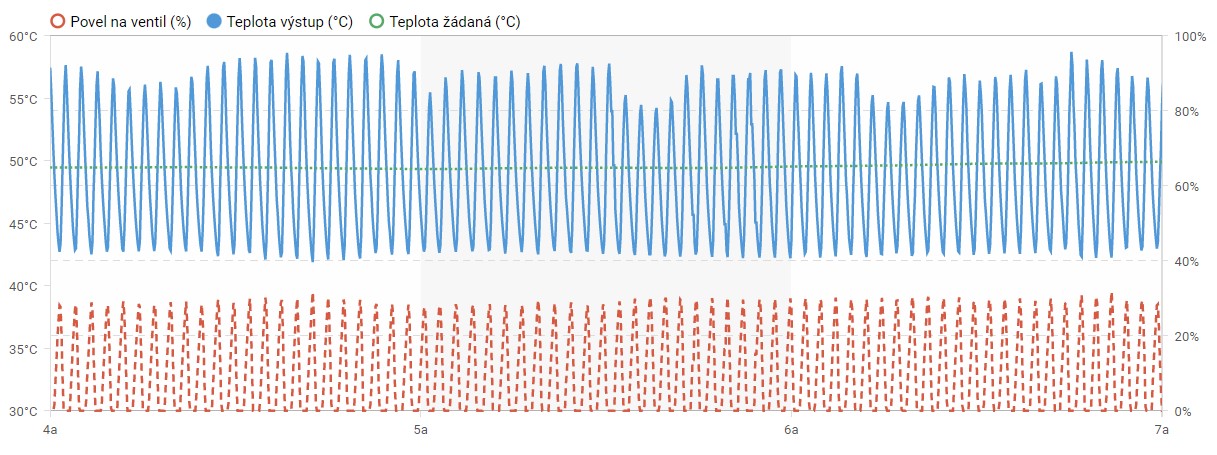
Obr. 1 PĆĂklad nadmÄrnĂœch oscilacĂ vlivem chybnÄ nastavenĂ©ho PID regulĂĄtoru. Teplota otopnĂ© vody se mÄnĂ v rozsahu 42 °C aĆŸ 58 °C, a to bÄhem nÄkolika minut, a nedochĂĄzĂ k ustĂĄlenĂ soustavy.
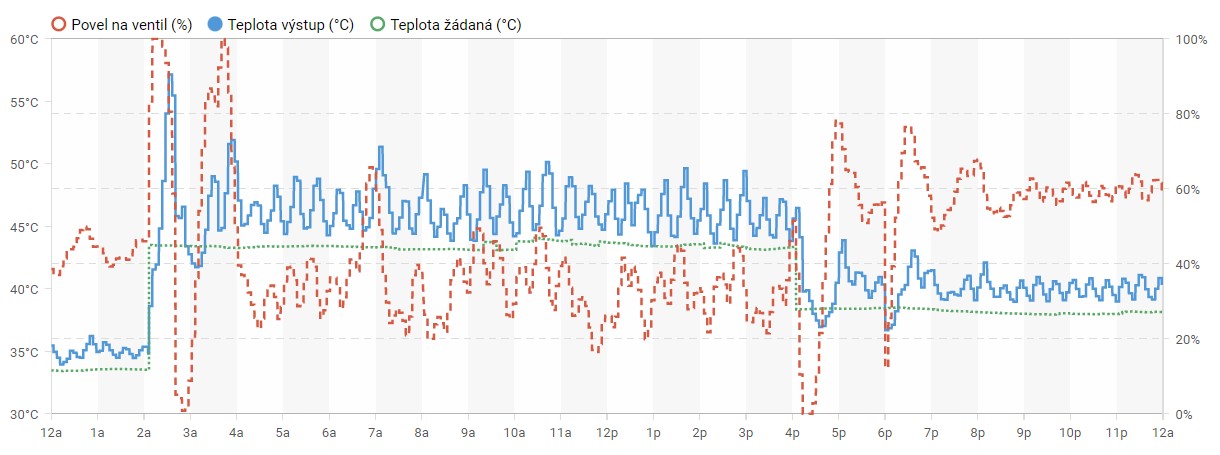
Obr. 2 PĆĂklad vĂœraznĂ©ho pĆekmitu, kdy po druhĂ© rannĂ hodinÄ dochĂĄzĂ ke skokovĂ© zmÄnÄ poĆŸadovanĂ© teploty otopnĂ© vody z 33 °C na 43 °C. Na to regulace reaguje ĂșplnĂœm otevĆenĂm ventilu, coĆŸ mĂĄ za nĂĄsledek krĂĄtkodobĂœ nĂĄrĆŻst teploty otopnĂ© vody aĆŸ na 58 °C, tj. o 15 °C vĂce neĆŸ je poĆŸadovĂĄno. OpÄt se jednĂĄ o chybu regulace.
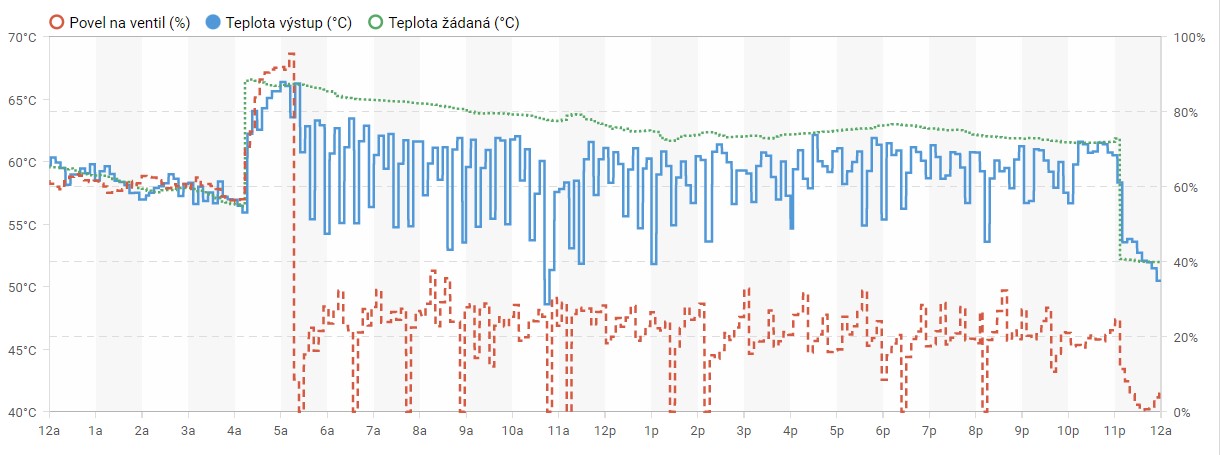
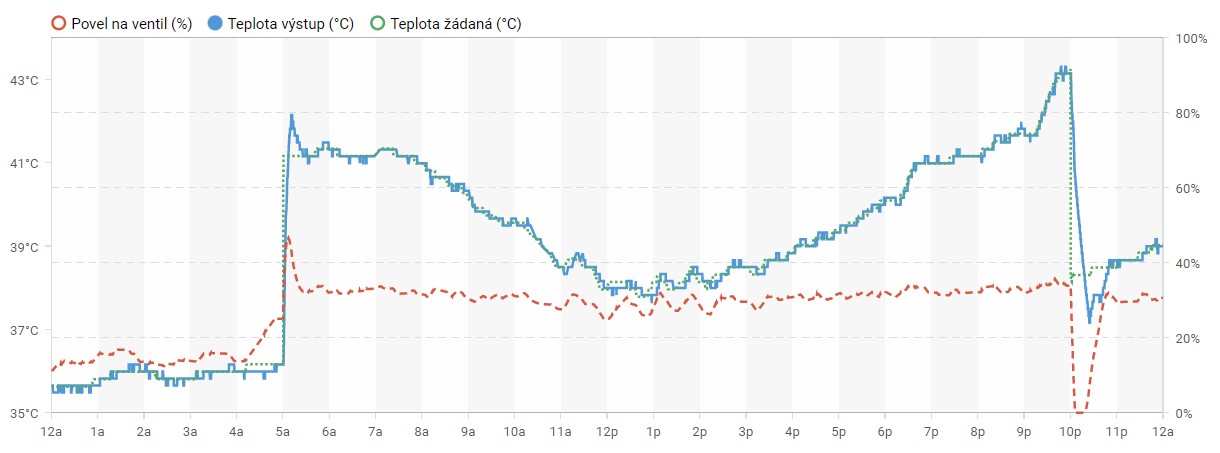
Obr. 3 PĆĂklad vĂœraznĂ©ho nedotĂĄpÄnĂ otopnĂ©ho okruhu, kdy od pĂĄtĂ© rannĂ hodiny nenĂ dosaĆŸeno poĆŸadovanĂ© hodnoty. V dobÄ nedotĂĄpÄnĂ ventil reguluje pouze v pĂĄsmu 0 aĆŸ 40 %, tudĂĆŸ se jednĂĄ o chybu regulace.
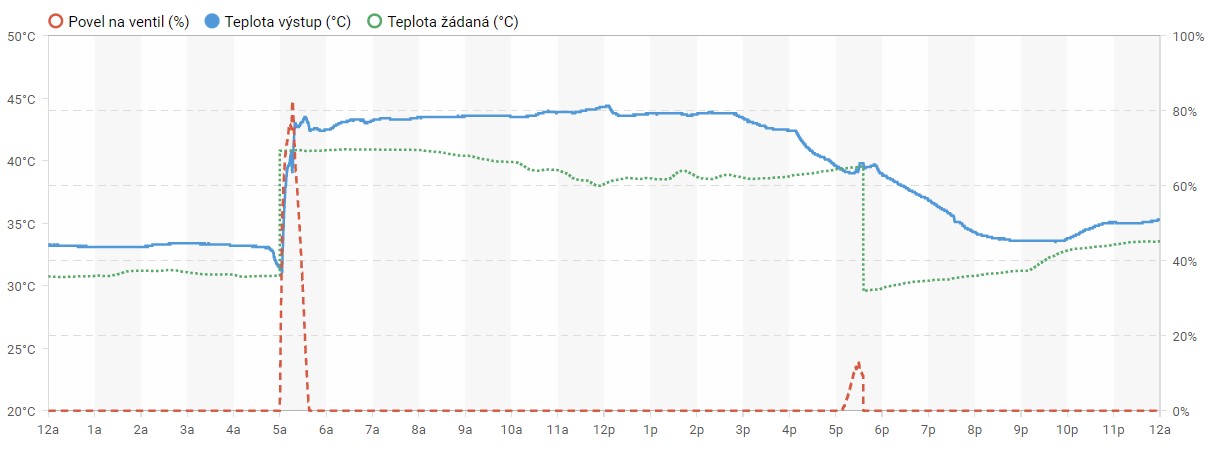
Obr. 4 PĆĂklad systematickĂ©ho pĆetĂĄpÄnĂ otopnĂ©ho okruhu. V tomto pĆĂpadÄ se ale nejednĂĄ o chybu regulace, jelikoĆŸ je ventil vÄtĆĄinu Äasu uzavĆen. TudĂĆŸ lze usuzovat na mechanickou poruchu smÄĆĄovacĂho ventilu.
ZajĂmavĂœm vedlejĆĄĂm efektem implementovanĂœch pravidel je moĆŸnost detekovĂĄnĂ vĂœbornÄ fungujĂcĂ regulaÄnĂch smyÄek. NĂĆŸe je uveden ukĂĄzkovĂœ pĆĂklad toho, jak takĂ© mĆŻĆŸe regulace teploty otopnĂ© vody vypadat.
Obr. 5 PĆĂklad velmi dobĆe naladÄnĂ© regulace. Teplota otopnĂ© vody sleduje poĆŸadovanou teplotu s odchylkou v ĆĂĄdu desetin °C a s minimĂĄlnĂm pĆekmitem a zpoĆŸdÄnĂm po zmÄnÄ poĆŸadovanĂ© hodnoty.
V prĆŻbÄhu ĆeĆĄenĂ bylo analyzovĂĄno 538 otopnĂœch okruhĆŻ, coĆŸ zahrnuje 2 501 unikĂĄtnĂch datovĂœch bodĆŻ. DĂky vzorkovĂĄnĂ na Ășrovni vteĆin bylo uloĆŸeno a analyzovĂĄno enormnĂ mnoĆŸstvĂ zĂĄznamĆŻ, konkrĂ©tnÄ pĆes 3 miliardy unikĂĄtnĂch zĂĄznamĆŻ (tj. pĂĄr ÄasovĂĄ znĂĄmka – hodnota). Ke zpracovĂĄnĂ dat byl pouĆŸit systĂ©m Mervis SCADA a analytickĂĄ platforma SkySpark, dĂky kterĂ© byl moĆŸnĂœ komplexnĂ pohled na celĂ© portfolio stovek otopnĂœch okruhĆŻ.
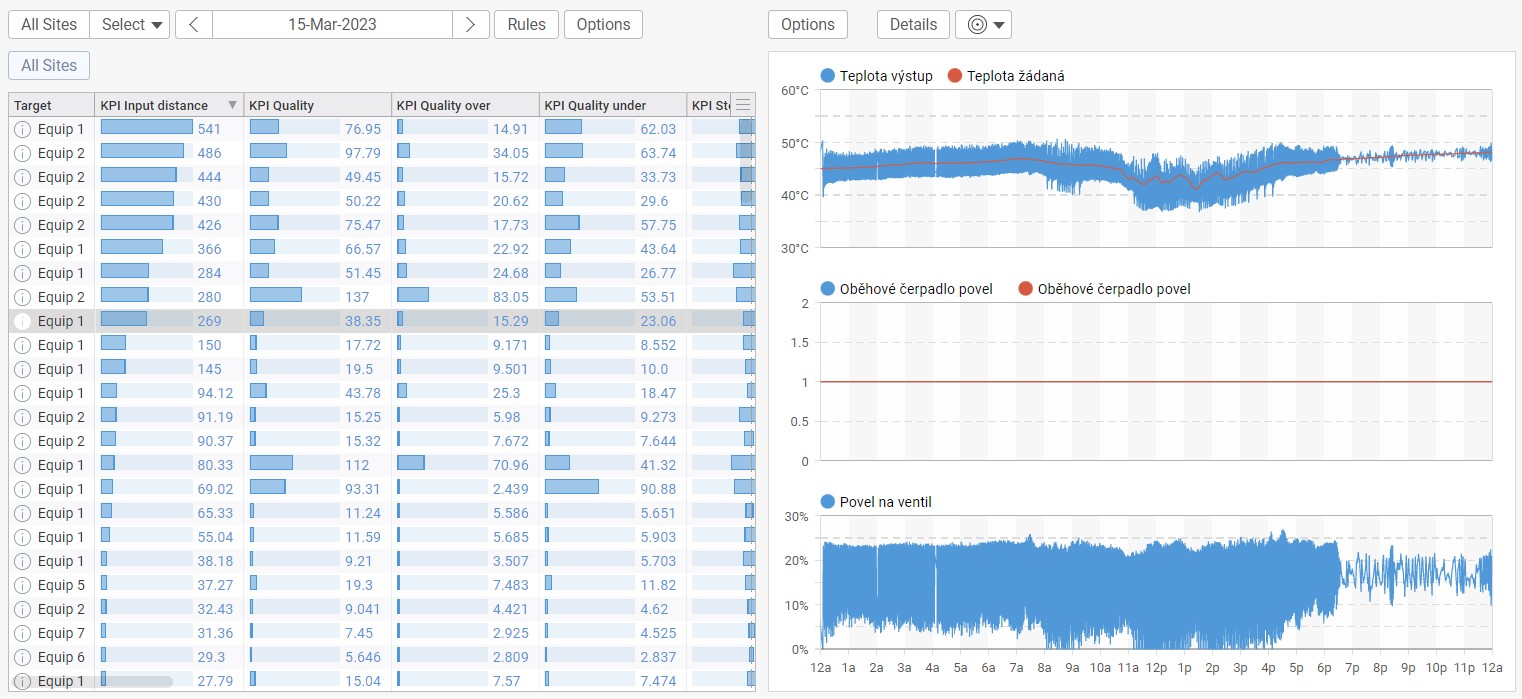
Obr. 6 UkĂĄzka diagnostiky regulaÄnĂch smyÄek. V levĂ© ÄĂĄsti jsou jednotlivĂ© smyÄky (ĆĂĄdky) a jednotlivĂĄ kritĂ©ria (sloupce). V pravĂ© ÄĂĄsti je pak detail aktuĂĄlnÄ vybranĂ© smyÄky, kterĂĄ vykazuje problĂ©m tĂœkajĂcĂ se oscilace.
SamonastavujĂcĂ se regulĂĄtor PID
Algoritmus samoladÄnĂ mĆŻĆŸe pracovat tak, ĆŸe fyzikĂĄlnĂ popis a data z procesu definujĂ jeho matematickĂœ model, kterĂœ nĂĄslednÄ spolu s kritĂ©riem optimality tvoĆĂ vstup pro vytvoĆenĂ optimĂĄlnĂho zĂĄkonu ĆĂzenĂ, tj. nalezenĂ parametrĆŻ regulĂĄtoru. V tomto procesu vĆŸdy dojde k nepĆesnostem, dĂky nimĆŸ takto naladÄnĂœ regulĂĄtor reĂĄlnÄ nebude optimĂĄlnĂ. V obrĂĄcenĂ©m pĆĂstupu, vyuĆŸitĂ©m v RoboPID, je vytvoĆen systĂ©m pĆĂznakĆŻ, kterĂ© se objevujĂ v odezvÄ ĆĂdicĂho systĂ©mu, pokud tento nenĂ nastaven optimĂĄlnÄ. PozorovĂĄnĂm skuteÄnĂœch odezev a hledĂĄnĂm pĆĂznakĆŻ lze potom dovodit, jakou korekci danĂœ regulĂĄtor vyĆŸaduje.
SamonastavujĂcĂ se regulĂĄtor RoboPID vyĆŸaduje pĆi inicializaci vĂœchozĂ parametry pro PID regulĂĄtor, kterĂ© jsou upravovĂĄny korekcemi. Pro rychlĂ© naladÄnĂ probĂhĂĄ cyklickĂ© odchylovĂĄnĂ od poĆŸadovanĂ© hodnoty o zadanou velikost. Pokud by odchylovĂĄnĂ nebylo pouĆŸito, pak mĆŻĆŸe k pozorovĂĄnĂ odezvy a korekcĂm dochĂĄzet pouze v pĆĂpadÄ zmÄn poĆŸadovanĂ© hodnoty. DĂky tÄmto odchylkĂĄm lze pozorovat odezvu ĆĂdicĂho systĂ©mu a urÄovat korekce regulĂĄtoru. TrvĂĄnĂ odchylek od poĆŸadovanĂ© hodnoty je dĂĄno rychlostĂ regulĂĄtoru. ÄĂm je regulĂĄtor rychlejĆĄĂ, tĂm ÄastÄjĆĄĂ jsou zmÄny odchylek. Po kaĆŸdĂ© odchylce a ustĂĄlenĂ systĂ©mu probÄhne vyhodnocenĂ skuteÄnĂ© odezvy, provede se korekce parametrĆŻ regulĂĄtoru a nĂĄsleduje dalĆĄĂ odchylka od poĆŸadovanĂ© hodnoty. PoÄet odchylek je uĆŸivatelem omezen tak, aby nemohlo dojĂt k tomu, ĆŸe algoritmus samoladÄnĂ bude pracovat v meznĂm cyklu a neustĂĄle mÄnit poĆŸadovanou hodnotu. Po provedenĂ zvolenĂ©ho poÄtu odchylek je samoladÄnĂ ukonÄeno a dĂĄle pokraÄuje pouze ĆĂzenĂ systĂ©mu. V pĆĂpadÄ nespokojenosti se stavem samonaladÄnĂ©ho regulĂĄtoru, napĆĂklad na zĂĄkladÄ vĂœĆĄe zmĂnÄnĂ© automatickĂ© diagnostiky, je moĆŸnĂ© povolit provedenĂ dalĆĄĂ sĂ©rie odchylek, kterĂ© opÄt povedou ke korekci parametrĆŻ regulĂĄtoru. Toto dalĆĄĂ samoladÄnĂ lze pouĆŸĂt i pro pravidelnĂĄ pĆelaÄovĂĄnĂ, kterĂœmi lze ĆeĆĄit problĂ©my vznikajĂcĂ napĆĂklad zanĂĄĆĄenĂm otopnĂ© soustavy Äi jinĂœch zmÄnĂĄch, kterĂ© majĂ dlouhodobĂœ vliv na chovĂĄnĂ systĂ©mu.
V rĂĄmci vĂœvoje regulĂĄtoru RoboPID probÄhla Ćada experimentĆŻ, vÄtĆĄina z nich probĂhala nÄkolikrĂĄt po sobÄ, pokaĆŸdĂ© s jinĂœm vĂœchozĂm naladÄnĂm regulĂĄtoru. Zpravidla se jednalo o jemnĂ© doladÄnĂ sprĂĄvnÄ nastavenĂ©ho regulĂĄtoru, potĂ© zrychlenĂ pomalĂ©ho a zpomalenĂ rychlĂ©ho regulĂĄtoru. SĂ©rie tĆĂ experimentĆŻ na jednĂ© smyÄce nemusĂ vĂ©st ke shodnĂ©mu naladÄnĂ parametrĆŻ regulĂĄtoru. DĆŻvodem je, ĆŸe vyhodnocenĂ optimĂĄlnĂho naladÄnĂ je ovlivnÄno vnÄjĆĄĂmi faktory, jako je napĆĂklad mÄnĂcĂ se teplota otopnĂ© vody nebo prĆŻtok otopnĂ© vody. Pokud by byl systĂ©m ideĂĄlnĂ, bez vstupnĂ chyby a ĆĄumu na mÄĆenĂ, tak by ladÄnĂ vĆŸdy konvergovalo ke stejnĂ©mu vĂœsledku. Toto lze dokĂĄzat pro dynamickĂ© systĂ©my prvnĂho ĆĂĄdu s dopravnĂm zpoĆŸdÄnĂm.
V ukĂĄzce na obrĂĄzcĂch 7 a 8 je moĆŸnĂ© pozorovat ĆĂzenĂ regulĂĄtoru pĆed ladÄnĂm a po ladÄnĂ na reĂĄlnĂ©m otopnĂ©m systĂ©mu. VĂœchozĂ regulĂĄtor byl nastaven pomalĂœ a po ladÄnĂ lze pozorovat zrychlenĂ reakce na zmÄnu ĆŸĂĄdanĂ© teploty.
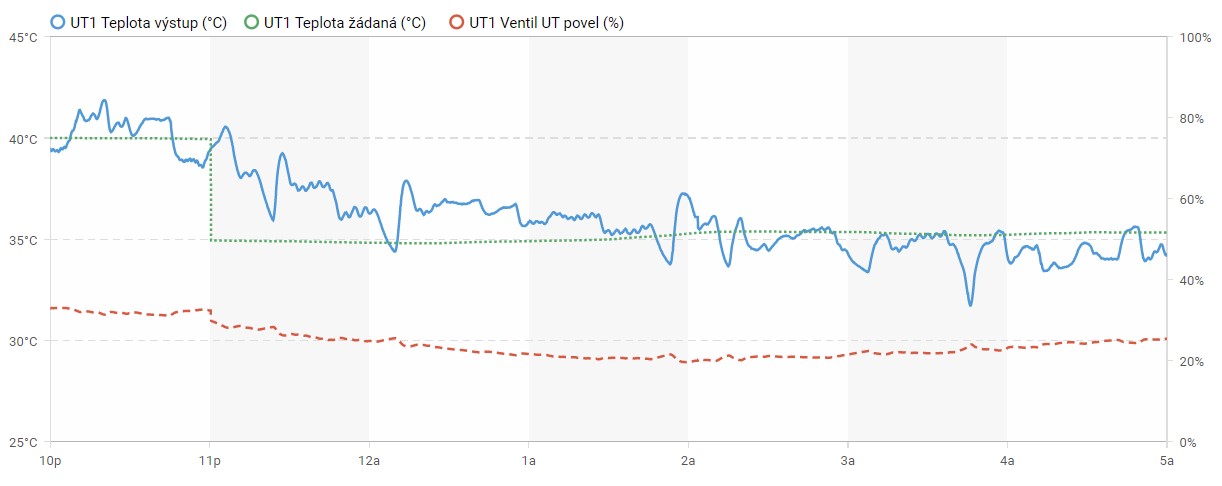
Obr. 7 PrĆŻbÄh vĂœstupnĂ teploty a polohy smÄĆĄovacĂho ventilu na UT1 pĆed spuĆĄtÄnĂm samoladÄnĂ. U teploty vĂœstupu lze pozorovat pomalou odezvu na zmÄnu ĆŸĂĄdanĂ© teploty. VĂœstupnĂ teplota osciluje okolo poĆŸadovanĂ© hodnoty.
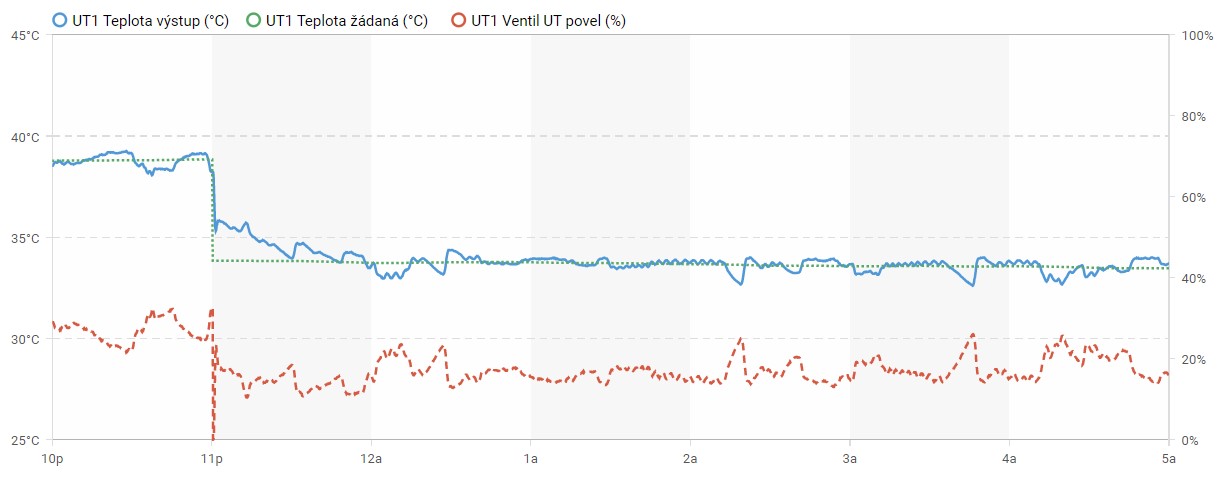
Obr. 8 PrĆŻbÄh vĂœstupnĂ teploty a polohy smÄĆĄovacĂho ventilu na UT1 po samoladÄnĂ. U teploty vĂœstupu lze pozorovat rychlou reakci na zmÄnu ĆŸĂĄdanĂ© teploty.
Na obrĂĄzcĂch 9 a 10 je uvedena ukĂĄzka ladÄnĂ z rychlĂ©ho regulĂĄtoru. PĆed procesem ladÄnĂ mÄl regulĂĄtor rychlĂ© reakce na zmÄnu teploty, ale nĂĄslednÄ osciloval okolo teploty poĆŸadovanĂ©. Oscilace jsou zpĆŻsobeny vlivem poruchy na vstupu, kterĂĄ dokĂĄzala rozkmitat soustavu a regulĂĄtor nereagoval sprĂĄvnÄ. Po provedenĂ samonastavenĂ je jiĆŸ regulĂĄtor pomalejĆĄĂ, reakce na zmÄnu ĆŸĂĄdanĂ© teploty je stĂĄle dostateÄnÄ rychlĂĄ a regulĂĄtor se nerozkmitĂĄvĂĄ vlivem poruch.
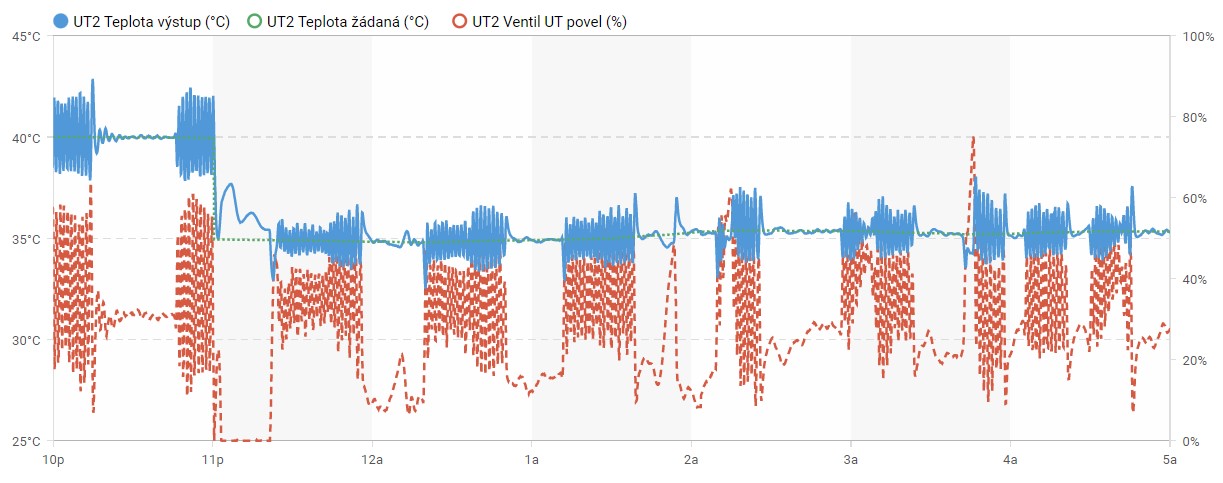
Obr. 9 PrĆŻbÄh vĂœstupnĂ teploty a polohy smÄĆĄovacĂho ventilu na UT2 pĆed spuĆĄtÄnĂm samoladÄnĂ. U tĂ©to smyÄky lze pozorovat rychlĂ© oscilace, kterĂ© majĂ negativnĂ vliv na ĆŸivotnost ventilu a rozkmitĂĄvajĂ celou soustavu.
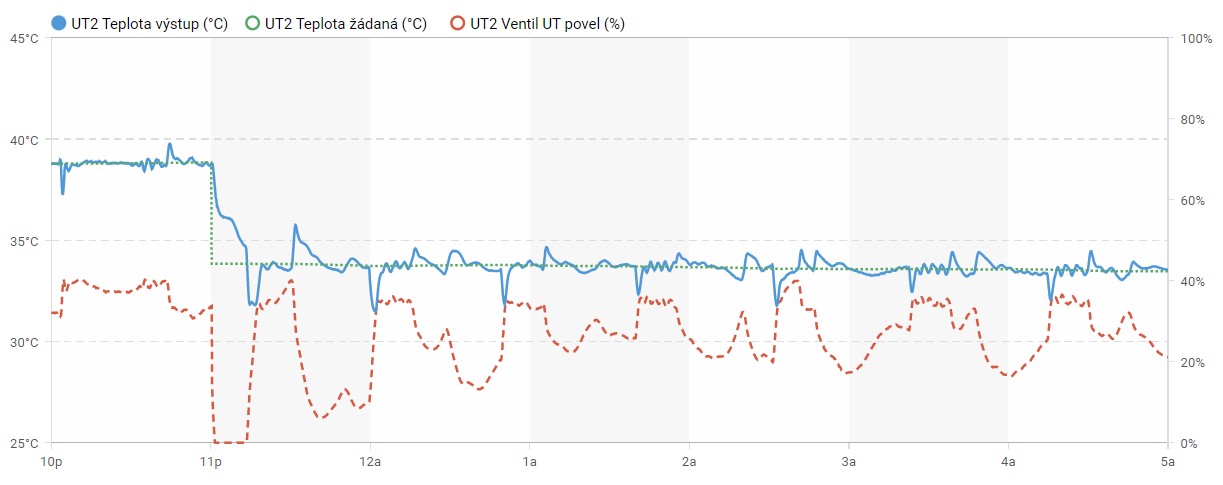
Obr. 10 PrĆŻbÄh vĂœstupnĂ teploty a polohy smÄĆĄovacĂho ventilu na UT2 po samoladÄnĂ. U vĂœstupnĂ teploty lze pozorovat zmĂrnÄnĂ oscilacĂ a zpomalenĂ zmÄn polohy ventilu.
Tyto dva experimenty byly provedeny na tĂ©mÄĆ identickĂ© otopnĂ© smyÄce. Jeden zaÄĂnal z pomalĂ©ho a druhĂœ z rychlĂ©ho vĂœchozĂho nastavenĂ. Pro oba regulĂĄtory byl spuĆĄtÄn proces ladÄnĂ po stejnÄ dlouhou dobu. V obou pĆĂpadech doĆĄlo ke zlepĆĄenĂ regulace vzhledem k vĂœstupnĂ teplotÄ.
ZĂĄvÄr
V ÄlĂĄnku byla diskutovĂĄna problematika regulace otopnĂœch soustav. Byly demonstrovĂĄny typickĂ© chyby a byl pĆedstaven koncept samonastavujĂcĂcho se regulĂĄtoru RoboPID. Tento regulĂĄtor je schopen si automaticky mÄnit parametry a zlepĆĄovat tak regulaci. To mĂĄ za nĂĄsledek minimalizaci negativnĂch jevĆŻ zpĆŻsobenĂœch ĆĄpatnÄ nastavenou regulacĂ jako jsou snĂĆŸenĂ ĆŸivotnosti ventilĆŻ nebo oscilace v otopnĂ© soustavÄ. Zcela zĂĄsadnĂ je ale aspekt Ășspory Äasu programĂĄtora mÄĆenĂ a regulace. Ten by v ideĂĄlnĂm pĆĂpadÄ mÄl strĂĄvit minimĂĄlnÄ desĂtky minut analĂœzou dynamiky otopnĂ© soustavy a ladÄnĂm parametrĆŻ PID regulĂĄtor. V pĆĂpadÄ pouĆŸitĂ RoboPID pouze nastavĂ parametry pro samoladicĂ experimenty a po pĂĄr dnech zkontroluje vĂœslednĂœ stav. S ohledem na stoupajĂcĂ cenu kvalifikovanĂ© prĂĄce bude Ășspora Äasu programĂĄtora nabĂœvat na vĂœznamu a mĆŻĆŸe bĂœt primĂĄrnĂ motivacĂ k aplikaci RoboPID. V neposlednĂ ĆadÄ mĂĄ takĂ© praktickĂœ dopad moĆŸnost snadnĂ©ho pĆeladÄnĂ regulĂĄtoru. To se mĆŻĆŸe provĂĄdÄt pravidelnÄ napĆ. jednou roÄnÄ, nebo na povel dispeÄera. DneĆĄnĂ budovy Äasto mÄnĂ ĂșÄel pouĆŸitĂ (napĆ. vlivem zmÄny nĂĄjemce) a to se odrĂĄĆŸĂ i ve zmÄnĂĄch dynamiky otopnĂ©ho systĂ©mu. BohuĆŸel na to nenĂ reagovĂĄno zmÄnou parametrĆŻ regulace. PrĂĄvÄ automatickĂ© pĆeladÄnĂ mĆŻĆŸe na tyto zmÄny pruĆŸnÄ reagovat a adaptovat se snadno na novĂœ zpĆŻsob vyuĆŸitĂ budovy.
PoznĂĄmka
ÄlĂĄnek byl ve formÄ pĆednĂĄĆĄky zveĆejnÄn na konferenci VytĂĄpÄnĂ TĆeboĆ 2023, kterou zorganizovala SpoleÄnost pro techniku prostĆedĂ. NĂĄslednÄ v rozĆĄĂĆenĂ© verzi v Äasopise VVI, ÄĂslo 4/2023.
Literatura
- Ć karda, Radek. NovĂ© metody pro monitorovĂĄnĂ a ohodnocovĂĄnĂ kvality regulace. DisertaÄnĂ prĂĄce, 2016.
- Franklin, Gene F., et al. Feedback control of dynamic systems. Vol. 4. Upper Saddle River: Prentice hall, 2002.
- O'DWYER, A. c2009. Handbook of PI and PID controller tuning rules. 3rd ed. London: Imperial College Press. ISBN 18-481-6242-1.
- O'DWYER, A. c2006. Handbook of PI and PID controller tuning rules. 2nd ed. London: Imperial College Press. ISBN 1-86094-622-4.
The PID controller is composed of proportional, integration and derivative parts. Inappropriately set parameters may cause unwanted phenomena in heating systems. Their suppression is enabled by the self-adjustment function.