Dynamickûˋ chovûÀnûÙ otopnû§ch táles s ohledem na regulaánûÙ zûÀsah
V ideûÀlnûÙm péûÙpadá poéƒadujeme, aby se tepelnûˋ ztrûÀty rovnaly aktuûÀlná dodûÀvanûˋmu tepelnûˋmu vû§konu. Tento proces je véÀak v áase nestûÀlû§ a prostéednictvûÙm procesé₤ regulace tepelnûˋho vû§konu se snaéƒûÙme co nejpéesnáji reagovat na danûˋ zmány podmûÙnek. Abychom dosûÀhli co nejefektivnájéÀûÙ regulace, je téeba zabû§vat se dynamickû§m chovûÀnûÙm otopnû§ch ploch obecná. Zde rozumûÙme dynamickû§m chovûÀnûÙm reakci na vyvolanû§ regulaánûÙ zûÀsah. PéûÙspávek se zabû§vûÀ dynamickû§m chovûÀnûÙm otopnûˋho tálesa s mûÙstnûÙ kvantitativnûÙ regulacûÙ pées termostatickû§ regulaánûÙ ventil opatéenû§ hlavicûÙ s kapalinovou nûÀplnûÙ (dûÀle jen „TRV“).
ûvod do problematiky
Typickû§m péedstavitelem dynamickûˋho dáje je nûÀbáh ái chladnutûÙ otopnûˋho tálesa. Pro jejich posouzenûÙ je téeba sledovat charakteristickûˋ veliáiny, jakû§mi jsou napéûÙklad tepelnû§ vû§kon nebo stéednûÙ povrchovûÀ teplota otopnûˋho tálesa. VyhodnocenûÙ takovû§ch dájé₤ je nejáastáji vyjûÀdéeno v grafickûˋ podobá. Z pohledu regulace jsou zûÙskanûˋ kéivky péechodovû§mi charakteristikami, tedy odezvami vû§stupnûÙ veliáiny na skokovou zmánu veliáiny vstupnûÙ, a jelikoéƒ si v technice prostéedûÙ mnohdy vystaáûÙme prûÀvá se skokovou zmánou vstupé₤, zabû§vali jsme se péedevéÀûÙm nespojitû§m (dvoupolohovû§m) chovûÀnûÙm TRV.
Dynamickûˋ vlastnosti otopnû§ch táles
Setrvaánost nûÀbáhu a chladnutûÙ
Setrvaánost nûÀbáhu resp. chladnutûÙ je vedle jinû§ch, zûÀkladnûÙm provoznûÙm parametrem otopnû§ch ploch. Uráujeme hodnoty Tn63 a Tn90, coéƒ jsou doby potéebnûˋ k dosaéƒenûÙ 63,2 resp. 90% jmenovitûˋho tepelnûˋho vû§konu otopnûˋ plochy. T63 a T90 pak slouéƒûÙ jako porovnûÀvacûÙ kritûˋria dynamickûˋho chovûÀnûÙ pro ré₤znûˋ druhy otopnû§ch ploch a to jak pro nûÀbáh, tak pro chladnutûÙ. Tyto hodnoty zjiéÀéËujeme spolehlivá zatûÙm pouze máéenûÙm [4].
ChladnutûÙ otopnû§ch táles
JednûÀ se o sniéƒovûÀnûÙ stéednûÙ povrchovûˋ teploty otopnûˋho tálesa v dé₤sledku ztrûÀtovûˋho tepelnûˋho toku z povrchu tálesa. V péûÙpadá ochlazovûÀnûÙ uvaéƒujeme, éƒe tepelnû§ tok smárem do tálesa je nulovû§ (TRV uzavéen). Jednotlivûˋ tepelnûˋ toky mé₤éƒeme vyjûÀdéit ze zûÀkladnûÙ tepelnûˋ bilance akumulace = péûÙvod − odvod [3]. Po û¤pravûÀch uvedenû§ch v [3] zûÙskûÀme rovnici popisujûÙcûÙ teoretickû§ pré₤báh (péechodovou charakteristiku) chladnutûÙ otopnûˋho tálesa. Grafickûˋ vyjûÀdéenûÙ tohoto vztahu je napéûÙklad v [1]. JednûÀ se o exponenciûÀlná zûÀvislou kéivku prvnûÙho éûÀdu probûÙhajûÙcûÙ mezi dváma ustûÀlenû§mi stavy. Nalezneme zde jedinû§ parametr popisujûÙcûÙ dynamickûˋ chovûÀnûÙ, kterû§ zûÀroveé udûÀvûÀ rychlost celûˋho péechodovûˋho jevu a je jûÙm áasovûÀ konstanta τ0. Tuto definujeme jako dobu potéebnou k dosaéƒenûÙ 63,2% poklesu z celûˋho péechodovûˋho dáje (dosaéƒenûÙ inflexnûÙho bodu). V souladu s vû§éÀe uvedenû§m je τ0 = T63 hlavnûÙm porovnûÀvacûÙm kritûˋriem.
NûÀbáh otopnû§ch táles
Analogickû§m zpé₤sobem jako u chladnutûÙ vychûÀzûÙme ze zûÀkladnûÙ tepelnûˋ bilance a dojdeme k obdobnûˋmu éeéÀenûÙ, opát popisujûÙcûÙmu kéivku s parametrem τ0. V aplikacûÙch techniky prostéedûÙ se véÀak nejáastáji setkûÀvûÀme s péechodovû§mi charakteristikami druhûˋho a vyéÀéÀûÙch éûÀdé₤ a prûÀvá nûÀbáhovûÀ kéivka je jednûÙm z takovû§ch péûÙpadé₤. Kéivky druhûˋho éûÀdu mohou obsahovat dobu pré₤tahu ái dopravnûÙ zpoéƒdánûÙ. S támito aspekty je nutno péi hlubéÀûÙm éeéÀenûÙ dynamiky kalkulovat. Pro naéÀe vyhodnocenûÙ vû§sledké₤ máéenûÙ jsou tyto veliáiny zanedbûÀny [2].
MáéenûÙ a vyhodnocenûÙ
V laboratoéûÙch ûstavu techniky prostéedûÙ FS áVUT v Praze bylo postupná napojovûÀno nákolik druhé₤ a typé₤ otopnû§ch táles k máéicûÙ soustavá [1] nákolika zpé₤soby péipojenûÙ, z nichéƒ alespoé jeden byl véƒdy jmenovitû§. Proces nûÀbáhu a chladnutûÙ byl pak sledovûÀn termoviznûÙ kamerou.
MáéenûÙ nûÀbáhu vyéƒaduje péedevéÀûÙm stav, kdy je otopnûˋ táleso na poáûÀtku máéenûÙ teplotná vyrovnanûˋ se svû§m okolûÙm tzn., éƒe stéednûÙ povrchovûÀ teplota tálesa se rovnûÀ teplotá okolnûÙho vzduchu. Naopak pro máéenûÙ chladnutûÙ je nezbytnûˋ vychûÀzet ze stavu, kdy mûÀ otopnûˋ táleso jmenovitûˋ teplotnûÙ parametry. Protoéƒe doba chladnutûÙ je podstatná deléÀûÙ, odpovûÙdajûÙ tomu i deléÀûÙ intervaly snûÙmanûÙ povrchovû§ch teplot.
StanovenûÙ hodnot setrvaánosti nûÀbáhu a chladnutûÙ
ZûÀznamem termoviznûÙ kamery vlastná sledujeme zûÀvislost stéednûÙ povrchovûˋ teploty tálesa na áase (tp = f (τ)), dûÙky áemuéƒ zûÙskûÀme grafickûˋ vyjûÀdéenûÙ dynamickûˋho procesu, tedy kéivku nûÀbáhu resp. chladnutûÙ. Sledovat tp umoéƒéuje fakt, éƒe péestup tepla na straná vody je daleko intenzivnájéÀûÙ neéƒ péestup tepla na straná vzduchu a zûÀroveé souáinitel tepelnûˋ vodivosti tenkûˋho materiûÀlu tálesa je vysokû§. Za táchto péedpokladé₤ mé₤éƒeme konstatovat, éƒe stéednûÙ teplota teplonosnûˋ lûÀtky twm se péibliéƒná rovnûÀ tp. Postupem uvedenû§m v [1] péevedeme zûÀvislost tp = f(τ) na zûÀvislost pomárnûˋho tepelnûˋho vû§konu otopnûˋho tálesa na áase Q/QN = f(τ). Podle tohoto vztahu jiéƒ snadno nalezneme hodnoty T63 a T90 nûÀbáhu i chladnutûÙ (T63⇔Q/QN = 0,632; T90⇔Q/QN = 0,9). Grafickûˋ vû§stupy pro jednotlivûˋ druhy a typy otopnû§ch táles v kombinaci s ré₤znû§mi zpé₤soby péipojenûÙ jsou velice rozsûÀhlûˋ [1], proto zde uvûÀdûÙme pouze vû§slednou tabulku, zachycujûÙcûÙ zkorigovanûˋ hodnoty setrvaánosti nûÀbáhu a chladnutûÙ, tak abychom je mohli porovnûÀvat.
| Druh a typ otopnûˋho tálesa | Zpé₤sob péipojenûÙ | Setrvaánost nûÀbáhu [min] | Setrvaánost chladnutûÙ [min] | ||
|---|---|---|---|---|---|
| Tn63 | Tn90 | Tch63 | Tch90 | ||
| DeskovûÀ | |||||
| KL 10 – 500 û 500 | jednostr. shora dolé₤ | 4,3 | 6,4 | 18 | 43 |
| oboustr. shora dolé₤ | 4,3 | 6,8 | 18,5 | 43,9 | |
| KL 10 – 500 û 1000 | jednostr. shora dolé₤ | 3,7 | 5,4 | 17,9 | 42 |
| oboustr. shora dolé₤ | 3,8 | 5,8 | 18,1 | 43,3 | |
| KL 10 – 500 û 2000 | jednostr. shora dolé₤ | 3,6 | 5,4 | 18,7 | 44,9 |
| oboustr. shora dolé₤ | 3,5 | 5,2 | 18,1 | 42,1 | |
| álûÀnkovûÀ | |||||
| Kalor 10 / 500 / 70 | jednostr. shora dolé₤ | 7,9 | 11,7 | 43,5 | 102,7 |
| oboustr. shora dolé₤ | 8,3 | 12,3 | 40 | 93,7 | |
| Kalor 10 / 500 / 220 | jednostr. shora dolé₤ | 7,8 | 12,3 | 45,3 | 109 |
| oboustr. shora dolé₤ | 8,1 | 12,3 | 43,9 | 106,4 | |
| TrubkovûÀ | |||||
| KLC – 1200 û 600 | oboustr. zdola dolé₤ | 8,6 | 18,1 | 28,5 | 60,3 |
Je zde zéetelnû§ rozdûÙl hodnot T63 mezi jednotlivû§mi tálesy. V rûÀmci jednoho druhu táles jsou hodnoty srovnatelnûˋ, ale v porovnûÀnûÙ s jinû§mi druhy se hodnoty vû§razná liéÀûÙ. Napé. álûÀnkovûÀ litinovûÀ otopnûÀ tálesa dosahujûÙ cca dvojnûÀsobnû§ch hodnot neéƒ deskovûÀ. Je to dûÀno péedevéÀûÙm daleko vyéÀéÀûÙ tepelnou kapacitou álûÀnkovû§ch litinovû§ch táles (silnostánnû§ materiûÀl a vátéÀûÙ vodnûÙ objem). Trubkovûˋ táleso se bude svû§m dynamickû§m chovûÀnûÙm blûÙéƒit spûÙéÀe tálesé₤m álûÀnkovû§m. VéÀechny tyto aspekty samozéejmá vû§razná ovlivéujûÙ dynamickûˋ chovûÀnûÙ danûˋho otopnûˋho tálesa.
Simulace dynamickûˋho chovûÀnûÙ otopnûˋho tálesa
Zpé₤sob regulace
Posuzujeme péedevéÀûÙm mûÙstnûÙ dvoupolohovou kvantitativnûÙ regulaci. JednûÀ se tedy o regulaci, kdy mánûÙme pouze hmotnostnûÙ pré₤tok teplonosnûˋ lûÀtky, péiáeméƒ jejûÙ teplota zé₤stûÀvûÀ konstantnûÙ. VéÀechny vû§éÀe uvedenûˋ parametry dokûÀéƒeme zajistit prostéednictvûÙm TRV, kterû§ je typickû§m zûÀstupcem P-regulûÀtoru, tedy spojitûˋho proporcionûÀlnûÙho regulûÀtoru s nastavenû§m pûÀsmem proporcionality. Toto platûÙ, pokud je termostatickû§ ventil osazen servo ái termopohonem. V praxi véÀak vátéÀinou bû§vûÀ osazen jednoduchou kapalinovou ái paroplynovou hlavicûÙ a v tûˋto kombinaci se skuteáná regulaánûÙ pré₤báh blûÙéƒûÙ dvoupolohovûˋmu chovûÀnûÙ (otevéeno/zavéeno) [2]. SamotnûÀ simulace pré₤báhu dynamickûˋho chovûÀnûÙ pak spoáûÙvûÀ ve sklûÀdûÀnûÙ déûÙve zûÙskanû§ch kéivek nûÀbáhu a chladnutûÙ okolo poéƒadovanûˋ hodnoty v rûÀmci stanovenûˋho pûÀsma proporcionality.
PûÀsmo proporcionality
Pro simulaci jsme zvolili celkem téi pûÀsma proporcionality, a to 1, 2 a 3 K okolo poéƒadovanûˋ teploty 20 ô¯C (tzn. 20 ± 0,5 K; 20 ± 1 K; 20 ± 1,5 K). SprûÀvnûÀ volba pûÀsma proporcionality TRV mûÀ na jeho provoznûÙ chovûÀnûÙ zûÀsadnûÙ vliv. Pokud bude ventil poddimenzovûÀn, bude pracovat ve stûÀle otevéenûˋ poloze a nebude plnit svoji regulaánûÙ funkci. Ve vû§sledku pak nebude otopnûˋ táleso podûÀvat tak vysokûˋ vû§kony, jakûˋ oáekûÀvûÀme. Naopak péedimenzovanû§ TRV pracuje v poloze tûˋmáé zavéeno a opát neplnûÙ svou regulaánûÙ funkci. Ventil neustûÀle zavûÙrûÀ a otevûÙrûÀ, coéƒ mé₤éƒe vûˋst k jeho nadmárnûˋmu opotéebenûÙ ái hlukovû§m projevé₤m. Pokud volûÙme pûÀsmo uéƒéÀûÙ napé. ± 0,5 K, mé₤éƒeme dosûÀhnout péesnájéÀûÙ regulace koneánûˋ hodnoty, obnûÀéÀûÙ to ovéÀem podobnû§ problûˋm jako péedimenzovanû§ TRV, tzn. nestabilitu a ztrûÀtu regulaánûÙ schopnosti. Péi volbá éÀiréÀûÙho pûÀsma proporcionality pak sniéƒujeme nûÀroky na dosaéƒenûÙ éƒûÀdanû§ch û¤spor energie. TeplotnûÙ rozsahy byly péevedeny na rozsahy vû§konovûˋ (tak aby korelovaly se zûÙskanû§mi pré₤báhy kéivek), resp. stanovili jsme hornûÙ x2 a dolnûÙ x1 spûÙnacûÙ hodnoty.
Ke sledovûÀnûÙ dynamickûˋho chovûÀnûÙ bylo vybrûÀno deskovûˋ otopnûˋ táleso KL 10 – 500 û 1000 s péipojenûÙm oboustranná shora dolé₤. SimulovûÀny byly celkem téi provoznûÙ stavy. Nejprve stav kdy je potéeba 100 % vû§konu tálesa, dûÀle stav kdy je zapotéebûÙ 62,6 % a 10 % vû§konu otopnûˋho tálesa tak, abychom máli péedstavu o chovûÀnûÙ regulûÀtoru v celûˋm vû§konovûˋm spektru.
VyhodnocenûÙ
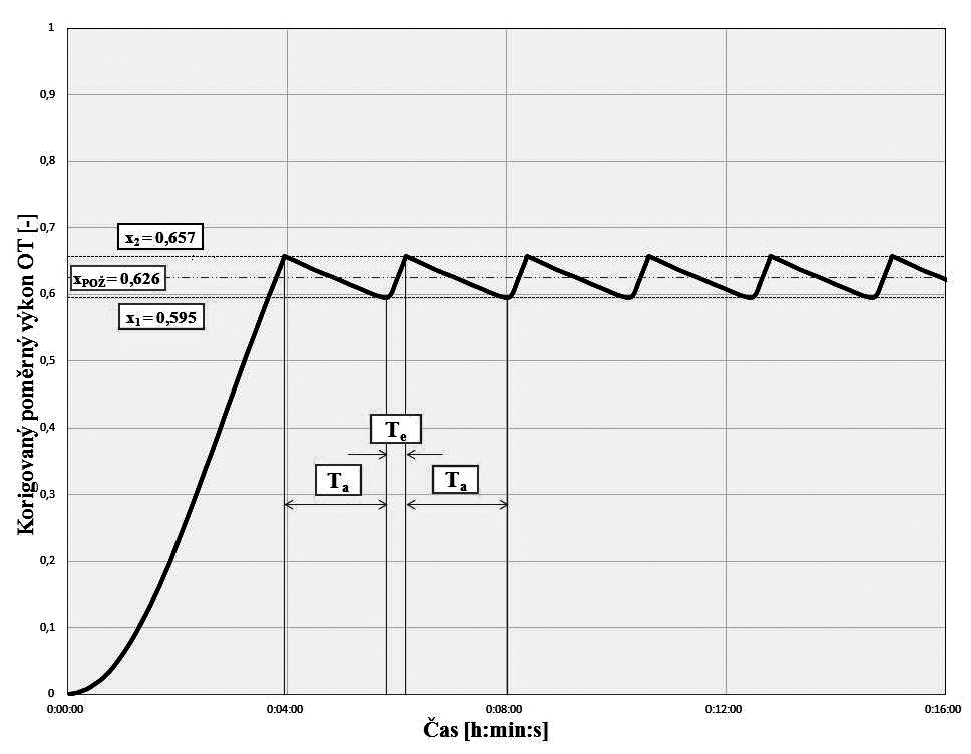
Obr. 1 Pré₤báh dynamickûˋho chovûÀnûÙ deskovûˋho otopnûˋho tálesa KL 10 – 500 û 1000 (20 ± 1 K)
Obdobná jako v péedeéÀlûˋm odstavci, tak i zde je velkûˋ mnoéƒstvûÙ vyhodnocenû§ch pré₤báhé₤ [1]. Proto byl vybrûÀn pré₤báh dynamickûˋho chovûÀnûÙ (reakce na regulaánûÙ zûÀsah) pouze vû§éÀe uvedenûˋho tálesa pro 62,6% potéebu vû§konu a pro pûÀsmo proporcionality 20 ± 1 K (obr. 1).
Z obr. 1 je zéejmûˋ, éƒe na poáûÀtku je regulovanûÀ veliáina rovna 0 %. Jelikoéƒ je poéƒadovanûÀ hodnota xpoéƒ = 62,6 %, vznikûÀ zde regulaánûÙ odchylka, na kterou reaguje regulûÀtor tak, éƒe zapûÙnûÀ svou akánûÙ veliáinu (vlnovec se uvoléuje a pruéƒina zvedûÀ kuéƒelku). TûÙmto zvû§éÀûÙ pré₤tok teplonosnûˋ lûÀtky otopnû§m tálesem, coéƒ zpé₤sobûÙ nûÀré₤st stéednûÙ povrchovûˋ teploty otopnûˋho tálesa, resp. jeho vû§konu. NûÀbáh probûÙhûÀ u jednotlivû§ch otopnû§ch táles podle zûÙskanûˋ kéivky nûÀbáhu s áasovou konstantou τ0 resp. T63, a to aéƒ do okaméƒiku, kdy je dosaéƒeno hornûÙ spûÙnacûÙ hodnoty x2. Pokud ve vytûÀpánûˋm prostoru dojde ke zmáná poéƒadavku ve smyslu snûÙéƒenûÙ poéƒadovanûˋ teploty nebo je dosaéƒeno prûÀvá hodnoty x2, dvoupolohovû§ regulûÀtor zavûÙrûÀ ventil a otopnûˋ táleso zaáûÙnûÀ chladnout podle zûÙskanûˋ kéivky chladnutûÙ. Toto probûÙhûÀ do chvûÙle, kdy je dosaéƒeno spodnûÙ spûÙnacûÙ hodnoty x1. NûÀsledná je ventil opát otevéen a táleso nabûÙhûÀ k hodnotá x2. Po prvotnûÙm nûÀbáhu, kdy je dosaéƒeno spûÙnacûÙ hodnoty x2, dochûÀzûÙ k cyklovûÀnûÙ pré₤báhu tepelnûˋho vû§konu v rûÀmci rozmezûÙ hodnot x1 a x2. Dobu, po kterou otopnûˋ táleso chladne, nazû§vûÀme dobou vypnutûÙ Ta a dobu, po kterou se vû§kon pohybuje po nûÀbáhovûˋ kéivce, nazû§vûÀme dobou zapnutûÙ Te [4]. PrûÀvá tyto dvá hodnoty, resp. jejich pomár byl vyuéƒit jako porovnûÀvacûÙ kritûˋrium (viz tab. 2). V praxi dochûÀzûÙ jeéÀtá k péekmitu poéƒadovanûˋho rozsahu a ten se pak rozéÀiéuje do tzv. pûÀsma kolûÙsûÀnûÙ. Zde je véÀak péekmitnutûÙ zanedbûÀno.
| Potéeba vû§konu | PûÀsmo proporcionality | Doba zapnutûÙ | Doba vypnutûÙ | Pomár Ta / Te [-] |
|---|---|---|---|---|
| Te [min] | ||||
| 100 % | ± 0,5 K | 4,42 | 0,42 | 0,1 |
| ± 1 K | 5,33 | 0,67 | 0,13 | |
| ± 1,5 K | 5,92 | 0,92 | 0,16 | |
| 62,6 % | ± 0,5 K | 0,2 | 1 | 5 |
| ± 1 K | 0,35 | 1,87 | 5,34 | |
| ± 1,5 K | 0,53 | 2,88 | 5,43 | |
| 10 % | ± 0,5 K | 0,23 | 6,08 | 26,43 |
| ± 1 K | 0,42 | 11,68 | 27,81 | |
| ± 1,5 K | 0,65 | 18,38 | 28,28 | |
ZûÀvár
100% potéeba vû§konu je stav specifickû§ tûÙm, éƒe stéednûÙ, tedy poéƒadovanûÀ hodnota xpoéƒ je rovna hornûÙ spûÙnacûÙ hodnotá x2. MûÀme tedy k dispozici pouze polovinu spûÙnacûÙho rozsahu. Oproti ostatnûÙm pré₤báhé₤m je tento stav specifickû§ tûÙm, éƒe doba zapnutûÙ je vû§razná deléÀûÙ neéƒ doba vypnutûÙ. Toto je dûÀno û¤seky kéivek, ve kterû§ch se s rozsahem pohybujeme. NûÀbáhovûÀ kéivka je v tomto rozmezûÙ velice plochûÀ, naopak kéivka chladnutûÙ je ve svûˋ nejstrmájéÀûÙ áûÀsti. Z tohoto dé₤vodu je pomár doby vypnutûÙ a doby zapnutûÙ Ta / Te menéÀûÙ neéƒ jedna. V praxi véÀak vû§éÀe zmûÙnánûˋ nebude zcela platit, neboéË vû§kony otopnû§ch táles nejsou navréƒeny péesná na jmenovitou tepelnou ztrûÀtu, ale dûÙky danûˋ vû§robnûÙ éadá táles mohou mûÙt vyéÀéÀûÙ vû§kon, neéƒ je jmenovitûÀ tepelnûÀ ztrûÀta. VátéÀinou tak projektant péedimenzuje otopnûÀ tálesa o 5 aéƒ 15 % vé₤ái skuteánûˋ tepelnûˋ ztrûÀtá mûÙstnosti. ZnaáûÙ to tedy, éƒe budeme ve skuteánosti mûÙt i za jmenovitû§ch podmûÙnek k dispozici celû§ spûÙnacûÙ rozsah. Pro véÀechny sledovanûˋ pré₤báhy takûˋ platûÙ, éƒe v nejuéƒéÀûÙm pûÀsmu proporcionality (± 0,5 K) je poáet cyklé₤ vyéÀéÀûÙ neéƒ v éÀiréÀûÙch sledovanû§ch pûÀsmech. Tento zûÀvár je tedy ve shodá s vû§éÀe popsanû§m faktem, éƒe uéƒéÀûÙ spûÙnacûÙ diference zapéûÙáinûÙ vátéÀûÙ kmitûÀnûÙ kuéƒelky ventilu a zpé₤sobuje vyéÀéÀûÙ opotéebenûÙ ái hlukovûˋ projevy.
Pro 62,6% potéebu vû§konu jiéƒ pozorujeme jak dolnûÙ, tak hornûÙ spûÙnacûÙ hodnotu, a tudûÙéƒ jsou sledovanûˋ rozsahy dvojnûÀsobná éÀiréÀûÙ neéƒ u 100% teoretickûˋ potéeby vû§konu. Péesto, éƒe je pûÀsmo éÀiréÀûÙ, nenûÙ rozdûÙl mezi dobou zapnutûÙ a vypnutûÙ tak markantnûÙ jako u péedchozûÙho stavu. Zde je doba vypnutûÙ deléÀûÙ neéƒ doba zapnutûÙ, coéƒ je opát dûÀno pré₤báhem jednotlivû§ch kéivek. ChladnutûÙ mûÀ v tomto rozsahu vû§razná ploéÀéÀûÙ pré₤báh neéƒ nûÀbáh. TûÙm je dûÀno, éƒe poáet cyklé₤ za srovnatelnûˋ áasovûˋ rozmezûÙ je v tomto péûÙpadá vyéÀéÀûÙ a jednotlivûˋ cykly jsou tudûÙéƒ kratéÀûÙ.
Péi 10% potéebá vû§konu se nachûÀzûÙme na opaánûˋ straná vû§konovûˋho spektra a to znamenûÀ, éƒe kéivka nûÀbáhu je ve svûˋ tûˋmáé nejstrmájéÀûÙ áûÀsti a kéivka chladnutûÙ je skoro plochûÀ. Proto pomár dob vypnutûÙ a zapnutûÙ vychûÀzûÙ nejvyéÀéÀûÙ prûÀvá zde. RozdûÙl v poátu cyklé₤ mezi ± 0,5 K a ± 1,5 K je tûˋmáé dvojnûÀsobnû§ a zde se tedy velmi nûÀzorná ukazuje praktickû§ rozdûÙl v nûÀvrhu regulûÀtoru pro zajiéÀtánûÙ jeho sprûÀvnûˋ funkce a dlouhodobûˋ spolehlivosti.
Z vû§éÀe uvedenûˋho je patrnûˋ, jak dé₤leéƒitûÀ je znalost setrvaánosti nûÀbáhu a chladnutûÙ u otopnû§ch táles resp. pré₤báhé₤ kéivek. ChovûÀnûÙ regulûÀtoré₤ je jinûˋ v ré₤znû§ch áûÀstech vû§konovûˋho spektra. Do rychlosti odezvy se promûÙtûÀ i akumulace otopnû§ch táles, resp. jejich tepelnûÀ setrvaánost. SamotnûÀ reakce otopnû§ch táles na regulaánûÙ zûÀsah je proto prodlouéƒena o dobu û¤márnou tepelnûˋ setrvaánosti.
VéÀechny uvedenûˋ pré₤báhy byly uráeny pouze pro jednu poéƒadovanou hodnotu. ReûÀlná se véÀak potéeba tepla neustûÀle mánûÙ, napé. vlivem oslunánûÙ, zmánou poéƒadavké₤ nebo dûÙky vniténûÙm zdrojé₤m tepla apod. Tomuto rozboru se dûÀle vánuje [1].
Pouéƒitûˋ zdroje
- [1] BohûÀá J. DiplomovûÀ prûÀce Dynamickûˋ chovûÀnûÙ otopnû§ch táles. Praha: áVUT, 2012. 136 s.
- [2] BaéÀta J. Regulace vytûÀpánûÙ. Praha: NakladatelstvûÙ áVUT, 2007. 99 s. ISBN 978–80–01–02582–6.
- [3] é imek J. DiplomovûÀ prûÀce Dynamickûˋ chovûÀnûÙ otopnû§ch táles. Praha: áVUT, 2007. 110 s.
- [4] BaéÀta J. Hydraulika a éûÙzenûÙ otopnû§ch soustav. Praha: NakladatelstvûÙ áVUT, 2003. 252 s. ISBN 80–01–02808–9.
We require that heat losses be equal to the currently supplied heat output, in an ideal event. However, this process is unsettled in time and we try to react precisely as best to the given changes of conditions through processes of the heat output control. It is necessary to deal with the dynamic behavior of heating surfaces, generally, to be able to achieve the most efficient control. The dynamic behavior is understood herein as the reaction towards the invoked control intervention. Authors are engaged in the dynamic behavior of radiators with local quantitative control through the thermal control valve fitted with the head with the liquid charge (hereinafter the “TRV” – Thermostatic Radiator Valve), in their contribution.